Animación de la NASA inspeccionando el Polar Exploration Rover (VIPER) en la superficie de la luna. Crédito de la imagen: NASA Ames / Daniel Rutter
Cualquier viajero de carretera experimentado sabe que para aprovechar al máximo la aventura, un buen mapa le ayudará. El primer rover robótico lunar que la NASA planea enviar a la luna a fines de 2023 no es diferente, en busca de hielo y otros recursos en y debajo de la superficie lunar. Volatiles Investigating Polar Exploration Rover (Viper para abreviar) es parte del programa Artemis de la agencia. En ausencia de una guía de viaje lunar, los planificadores de la misión VIPER están creando un nuevo mapa de elevación digital de alta resolución de la superficie lunar.
Equipado con estos mapas, el rover podrá atravesar la luna de manera más segura y eficiente, mientras busca recursos en el polo sur lunar. El hielo es un recurso de especial importancia científica, porque si se encuentra en el espacio y se convierte en otros recursos para una mayor exploración del sistema solar, como el oxígeno y el combustible de cohetes, puede tener aplicaciones.
Estos mapas proporcionan un modelo 3D del terreno antártico lunar a una escala de aproximadamente tres pies (un metro) y muestran las condiciones cambiantes de luz y temperatura causadas por las largas sombras que barren el paisaje.

Ilustración de la NASA examinando las sustancias volátiles del Polar Exploration Rover (VIPER) en la superficie de la luna. Crédito de la imagen: NASA Ames / Daniel Rutter
Además de evitar que el rover se descargue desde el borde de un cráter empinado, esta vista cercana de la superficie lunar también proporciona información importante para que los planificadores de la misión se aseguren de que las baterías solares del rover permanezcan cargadas y guíen al rover a un lugar seguro. Durante el período de comunicación, la acción de la misión en la tierra inactiva se apaga.
“Estamos enviando VIPER a uno de los entornos más dinámicos de la luna, y el rover debe poder aceptar lo que la luna proporciona”, dijo Anthony Colaprete, científico del proyecto VIPER en el Centro de Investigación Ames de la NASA en Silicon Valley, California. “Es por eso que creamos estos mapas únicos a escala humana para ayudarnos a planificar cuidadosamente la ruta del rover, mientras operamos de manera segura y recopilamos los mejores datos científicos posibles”.
Estos mapas han revelado nuevas características de importancia científica en la superficie lunar, incluidas muchas “mini trampas frías”: son bolsas de sombras de 6 a 16 pies (2 a 5 metros) de ancho en la superficie lunar, pueden ser lo suficientemente frías como para recolectar . Además de los cráteres más profundos y antiguos que son el foco de la misión VIPER, estas trampas frías en miniatura también proporcionan áreas para la exploración.

Una espectacular vista oblicua del borde del cráter Shackleton cerca del polo sur de la luna. El cráter tiene aproximadamente 13 millas (21 kilómetros) de diámetro. Aunque ningún lugar de la luna está iluminado continuamente, los tres puntos en el borde de la luna se concentran en el sol durante más del 90% del año. Estos puntos están rodeados por depresiones del terreno que nunca reciben luz solar, formando trampas frías que pueden atrapar el hielo. La cámara de ángulo estrecho del Lunar Reconnaissance Orbiter de la NASA tomó esta foto el 1 de agosto de 2006.Fuente de la imagen: NASA / GSFC / Arizona State University
Colaprete dijo: “Solíamos pensar que el hielo de agua solo se acumularía en los cráteres profundos y oscuros de la luna”. “Pero ahora creemos que incluso los cráteres pequeños y sombreados pueden ser lo suficientemente fríos como para retener moléculas de agua. Estas son. Pequeñas trampas frías” son mucho más comunes que las grandes trampas frías, por lo que comprender cómo almacenan el agua es importante para responder a la pregunta más amplia del comportamiento del agua en la luna “.
Para crear el mapa de elevación, un equipo de Ames está utilizando la herramienta de software Stereo Pipeline de código abierto de la NASA y el poder de procesamiento de la supercomputadora Ames Pleyadiana para superponer miles de imágenes satelitales tomadas por la cámara en el orbitador de reconocimiento lunar.
Los ingenieros están combinando estas poderosas herramientas y experiencia con capacidades de procesamiento de fotografías llamadas fotometría. Esta técnica, también conocida como “forma de sombra”, combina ángulos de luz solar conocidos con los niveles de gris de muchas imágenes bidimensionales para inferir la forma tridimensional de la superficie lunar. El modelo de terreno lunar resultante permite a los ingenieros calcular el efecto de la luz y la sombra en la superficie lunar en cualquier momento del pasado o del futuro. Por ejemplo, con este modelo, pueden predecir cuándo y dónde aterrizará el rover y planificar el movimiento del rover para mantenerlo al sol y evitar las sombras.
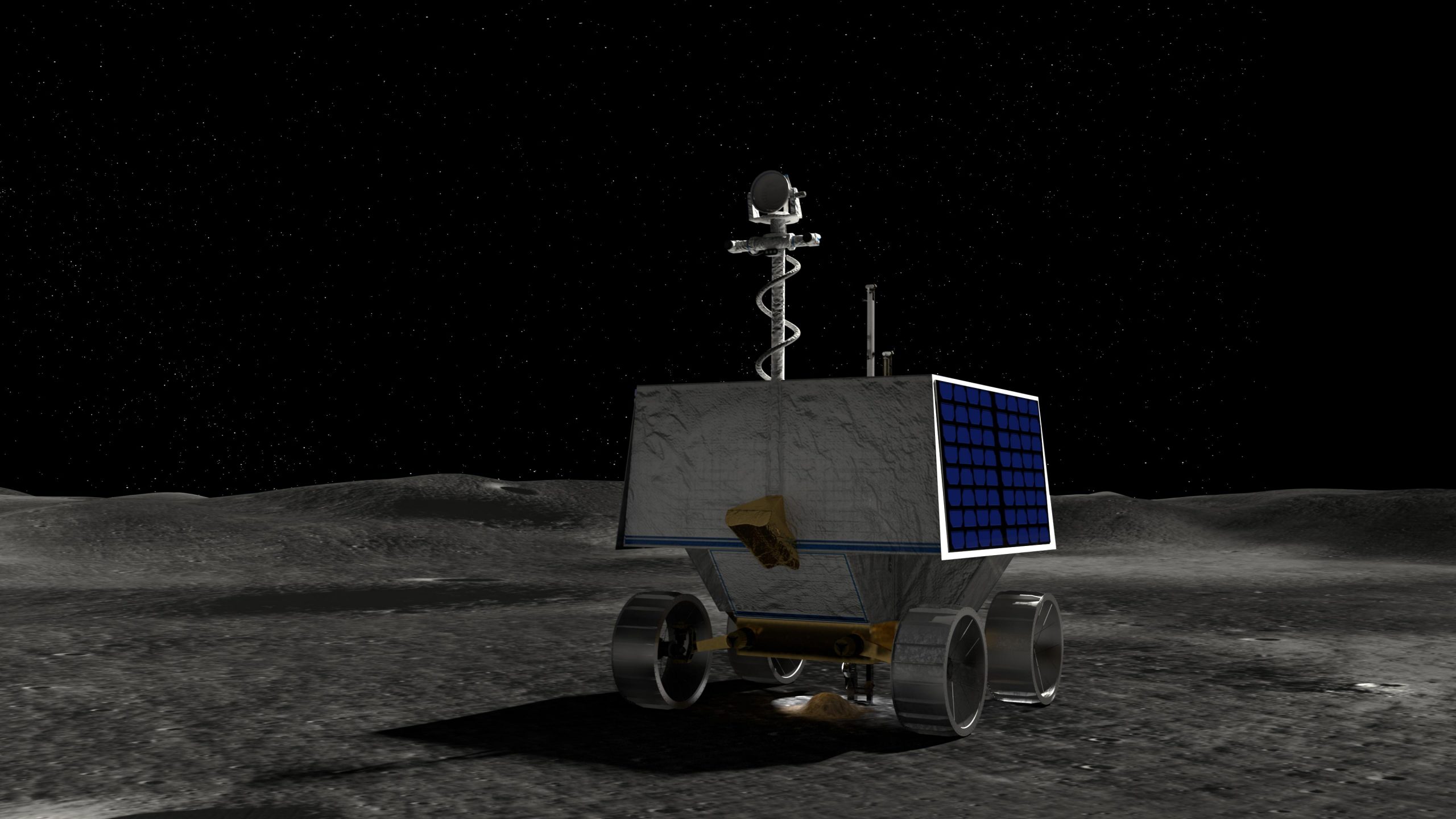
Ilustración de la NASA examinando las sustancias volátiles del Polar Exploration Rover (VIPER) en la superficie de la luna. Crédito de la imagen: NASA Ames / Daniel Rutter
Con condiciones de luz conocidas, el equipo puede crear mapas de temperatura detallados en varios terrenos, la superficie y un poco más de 8 pies (2,5 metros) por debajo. La temperatura puede fluctuar ampliamente desde menos 400 grados Fahrenheit a 170 grados Fahrenheit, haciendo de la superficie lunar un tablero de ajedrez donde es posible y extremadamente improbable detectar la ubicación del hielo. Equipado con estos nuevos mapas, el equipo puede seleccionar ubicaciones donde puede haber hielo y enviar a VIPER para que muestre y verifique si hay hielo y, de ser así, qué tan estable es en diversas condiciones lunares.
“Estos mapas de alta resolución cambiaron por completo nuestras mentes”, dijo Kimberly Ennico Smith, científica asociada del proyecto Ames VIPER. “Estamos empezando a ver que las condiciones del suelo en la Luna varían ampliamente, incluso en áreas que alguna vez pensamos que eran bastante uniformes. Esto nos permitirá determinar con más cuidado las ubicaciones de perforación del rover y nos llevará a recopilar mejores datos científicos”.
Los miembros del equipo VIPER que son responsables de mantener el rover en funcionamiento están muy interesados en comprender la situación a la que se enfrentará el rover todos los días o cada minuto.
Mark Shirley, jefe del plan de acción de la misión de Ames, dijo: “La sombra se mueve alrededor del polo sur de la luna aproximadamente a la misma velocidad que el vehículo lunar”. “Debemos planificar con anticipación para evitar que VIPER sea superado por la oscuridad, nada. sale mal. habitación “.

